


自動駕駛是指智能汽車通過安裝配備在車上的傳感器設備(包括2D攝影視覺感知、激光雷達、毫米波雷達等)感知汽車周圍的駕駛環境,結合導航的高精度地圖等地圖數據,進行快速的運算與分析,在不斷模擬和深度學習潛在的路況環境并作出判斷,進一步借助算法規劃汽車最理想或最合適的行駛線路及方式,再通過芯片反饋給控制系統進行剎車、方向盤控制等實際操作動作。
一、概況
隨著移動互聯網的流量天花板逐漸見頂,互聯網與實體行業如農業、工業、建筑業和服務業等傳統行業的數字化融合將成為新的趨勢,產業互聯網結合5G和云計算等技術將加快實體經濟轉型。
汽車作為產業互聯網場景下必不可少的智能移動設備,隨著新一代的汽車技術革命如新能源、智能網聯、自動駕駛的創新,將結合不同的落地場景打造可復制循環的商業模式閉環。
新能源汽車與自動駕駛打造智能網聯汽車的基礎架構
數據來源:公開資料整理
在自動駕駛行業熱度飆升之初,算法型公司和主機廠對自動駕駛L4~L5級別的落地時間規劃在2018~2022年,但從政府對自動駕駛的開放態度、復雜道路突發情況的發生和“地理圍欄”效應對部分場景的適應性來看,不同場景的落地時間差異顯著。
二、ADAS
ADAS(高級別輔助駕駛),是一個主動安全功能集成控制系統,利用雷達、攝像頭等傳感器采集汽車周邊環境數據,進行靜態、動態物體的識別、跟蹤,控制系統結合地圖數據進行做出行為決策,使駕駛者覺察可能發生的危險,必要情況下直接控制車輛以避免碰撞,可有效提升駕駛安全性、舒適性。
ADAS是實現自動駕駛的前提,自動駕駛與ADAS(高級輔助駕駛)都是通過傳感器,收集車內外的數據來反饋車周邊的異常信息。區別在于,ADAS是通過周邊信息的異常反饋給駕駛員,由駕駛員根據反饋的道路信息和傳感器數據進行駕駛操作。而自動駕駛的最高級階段,則是通過傳感器反饋的數據,傳輸給決策層做出決策,最終由控制層將行為動作引導給系統,系統完成最終的操作。
已實現L2級別(ADAS)的國內量產車型
主機廠 | 事件 | 車型 |
長安 | 2018年發布2款L2級別自動駕駛量產車型 | CS55、CS75 |
長城 | 2018年發布2款L2級別自動駕駛量產車型 | F7、VV6 |
吉利 | 2018年發布3款L2級別自動駕駛量產車型 | 繽瑞、繽越、博越GE |
上汽 | 2018年發布1款L2級別自動駕駛量產車型 | MarvelX |
廣汽 | 計劃基于GS5換代車型實現L2級自動駕駛量產 | GS5 |
北汽 | 計劃于2019年實現L2級自動駕駛量產 |
數據來源:公開資料整理
ADAS在定義中并沒有對覆蓋范圍有具體的限定,從無自動化向無人駕駛的技術創新都可看作是ADAS的一部分。而ADAS的實現過程從硬件設備操作感知系統,數據庫、芯片算法等規劃具體決策,電機等控制單元操作控制系統。整體過程離不開感知-決策-控制的操作線條。目前ADAS包含但不限于自適應巡航控制、盲點探測、前方碰撞預警系統、夜視系統等。
一、 自動駕駛標準
由于從無自動化干擾到最終的無人駕駛過程中,會出現不同程度的系統干預,各國協會分別對自動駕駛劃分了不同級別和標準,各國商業公司按照劃分的級別來對外宣布研發階段和落地成果。目前已知的標準包含由CAAM(中國汽車工業協會)、NHTSA(美國高速公路安全管理局)、SAE(美國機動車工程學會)各自制定。而國際上通用的標準是以SAE制定的L0-L5六個階段為主。
L0:此階段無自動化設備介入。由駕駛員全程操控汽車。
L1:單一功能自動化。在特定駕駛環境下,單項輔助駕駛系統可通過獲取車輛周邊環境信息反饋給駕駛員,但動態操作由駕駛員完成。
L2:部分系統自動化。多項輔助駕駛系統根據環境信息對汽車的橫向和縱向駕駛動作同時進行操作,動態操作依舊由駕駛員完成。
L3:在特定環境下,系統完成全部動態操作,但駕駛員需要在特殊情況發生時,給予系統回應。目前大多商業公司集中此階段的落地。
L4:在特定環境下,即使駕駛員未對特殊情況進行回應,系統依舊負責執行全部動態駕駛動作。
L5:系統進行全路況的動態駕駛動作,駕駛員可對系統進行管理。
二、 駕駛場景
自動駕駛從概念提出到發展到現階段,最重要的兩個目的是降低駕駛風險提升安全,進而降低成本實現量產。不僅乘用車和商用車的車型會有所區別,其各自所適用的場景也差別較大,商業路徑各不相同。
自動駕駛主要適用場景及各場景商業化程度、代表公司
主要場景 | 場景概述及商業程度 | 代表公司 |
Robo-taxi | Robo-taxi基于自動駕駛面向C端用 戶提供出行服務,目前Waymo等美 國企業在本地開啟試運營階段。 | Waymo Drive.ai Pony.ai |
ADAS | 現有量產車型中大多都是覆蓋ADAS 的L2級別車型,駕駛員根據系統反 饋的危險信號進行動態操作。 | 地平線 Momenta Mobileye |
物流 (高速+最后一公里) | 長途的高速物流場景側重實現L3/L4 級別降低貨運成本,商業化程度高。 低速最后一公里為實現無人配送。 | 圖森未來 Embark Nuro.ai |
城市出行/乘用車 | 城市化道路是研發階段最久、量產 時間線最長、突發情況最多的場景, 商業化程度受眾多因素影響。 | Waymo AutoBrain 小馬智行 |
Others: 泊車 環衛 礦區等 | 剩余場景,包含低速下后裝市場的 泊車場景、負責清潔環衛的無人清 潔車以及礦區下的重卡線控市場。 | 禾多科技 仙途智能 踏歌智行 |
數據來源:公開資料整理
乘用車:現階段并沒有完全出臺與乘用車上路或量產的相關法律條文或政策文件,大部分解決方案無法滿足L3-L5級別的技術條件,外加安全問題、法律責任問題、消費者認知普及等問題,目前來看落地有難度,但隨著與整車廠的量產開始同步,近期也出現了轉機。
商用車:商用車由于不同的適用場景,因此在落地性上各不相同,目前主流落地性較強的場景包括自動駕駛叫車服務、高速運輸、港口貨運、礦區、市政環衛以及最后一公里物流。
干線物流場景,主要基于L4的系統操控。穿梭于有大量公路貨運需求的城市之間。計價方式與運送貨物的體積、重量、品類、等因素息息相關。而回到自動駕駛落地干線物流的主因,不外乎降本與提效。
美/日/中物流運輸成本結構
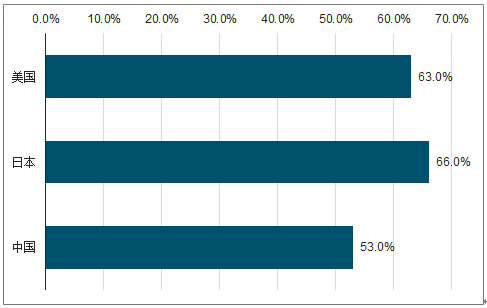
數據來源:公開資料整理
美/日/中物流倉儲成本結構
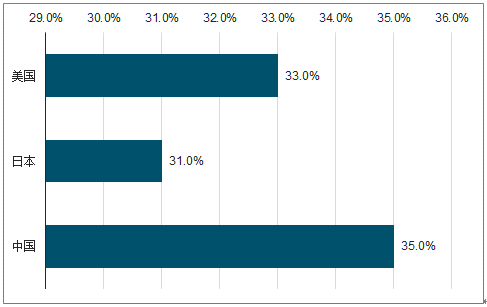
數據來源:公開資料整理
美/日/中物流管理成本結構
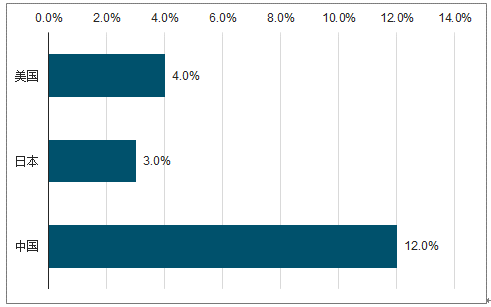
數據來源:公開資料整理
結合中美日三國的物流成本來看,運輸成本是在包含倉儲及管理費用在內占比最高的核心成本。
司機薪資:以美國勞工統計局的統計數據為準,卡車司機年收入的中位數約在44,500美元左右。
國內單個司機的駕駛成本年薪構成也至少超過20萬元,結合單個車輛2個司機輪流執勤的情況,在干線物流駕駛司機存量少、增量低的大背景下,運輸需求上漲將面臨供給不足的情況。
L4級:搭配L4級自動駕駛技術,無需駕駛員便可以通過傳感器感知周邊車輛環境和動態,結合結構化道路的位置和標識,為下一步行駛做出決策,并由系統進行最后的決策。在這段過程中,司機的工作負擔大大降低。未來隨著政策放開和技術不斷發展,可以實現完全無人化,無需安全員在車內。
費用方面,以圖森未來在亞利桑那州和德州落地的商業模式為例,盡管前期試運營車輛單車成本高(獨立采購激光雷達等設備),但后續量產后按照不同客戶的需求定制化費用標準。且前裝系統量產后的整車可以降低意外事故發生率、提升駕駛安全、降低司機費用的投入。
油耗及罰款:在國內的高速路段中,由于不同年限的商用運輸車輛在一定時期內會達到年限,但高昂的購車成本還是會讓企業選擇繼續使用該車輛。因此,在高速路段臨檢時,經常會遇到排放標準不達標導致的罰款事件。
自動駕駛在成本及管理成本幫助企業減負
駕駛成本 | 司機薪資 | 傳統:2個司機輪流執勤、成本高 L4級:按路段付費等多種模式、無需安全員 |
油耗及罰款 | 傳統:油耗大汽車壽命短、節省購置成本 L4級:油耗大幅縮減、車輛使用時限加長 | |
管理成本 | 運營費用 | 傳統:調度司機進行長途作業并維護車輛 L4級:無需安全員、車輛報損次數下降 |
數據來源:公開資料整理
半封閉樞紐場景涉及到的具體場景
市政環衛 | 道路清潔:將自動駕駛 與環衛車進行結合,用 作無人道路清潔。 |
接駁車 | 接送服務:將封閉園區 內提供接駁服務。 |
礦區 | 礦物運輸:在礦區的相 對結構化道路下,進行 運輸作業。 |
物流園區 | 車輛調度:物流園區內 的車輛作業密度大,通 過自動駕駛優化線路。 |
數據來源:公開資料整理
物流園區的車輛改造解決的問題,主要在于貨運量的逐年提升下,運輸車輛的運行時間更長,園區內集裝箱等大型貨物的移動和單位周轉量也越大,停車需要達到厘米級的精度,還要與起重機進行交互。國家統計局數據顯示,全國貨運量和公路貨運量都在逐年提升,貨物運輸量由2015年的417.6億噸增長到2018年的514.6億噸。
最后一公里配送服務,以快遞配送和外賣場景為主,屬于區別于乘用車的低速行駛,能夠解決配送時間、配送需求以及客戶隱私安全性等問題,但在行駛過程中會涉及大量內部道路及非機動車道,依舊需要解決外部干擾等因素。目前包含京東、蘇寧等在內企業都開始參與到無人配送車的測試與量產環節。
2015-2018年全國貨運量、公路貨運量及公路貨運周轉量
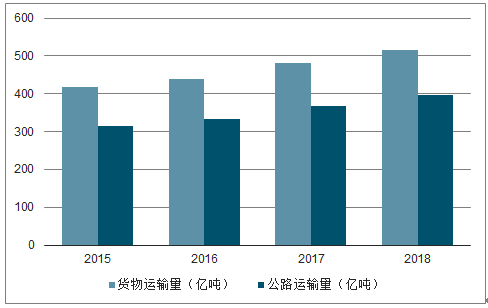
數據來源:公開資料整理
以半封閉樞紐為例,自動駕駛在此固定區域及低速環境下落地相對乘用車在復雜城市道路下面臨的各類V2X問題,處理方式更為直接,區別在于同一場景下,哪個企業提供的算法更全面、解決方案量產成本合適、以及滿足主機廠在礦區、物流園區以及港口的需求。
五、競爭格局
自動駕駛行業在場景中的滲透離不開算法和硬件設備的支持,不同的場景下,各家公司所采用的傳感器設備、芯片、計算方式是區別公司之間競爭力的技術優勢。
對于自動駕駛下的不同級別,成熟的(L2級別)設備支持相對完善,包含激光雷達、攝像頭視覺解決方案、芯片(如Mobileye的EyeQ系列產品)等在內已經擁有成熟的一級零部件供應商。
而對于逐步開發的(L3級別以上)算法及系統,對硬件和算法的要求越來越高,車規級標準逐步提升,因此給了一些創業公司挖掘商機的機會,如何在新一個研發階段提供有競爭力的設備成為發力的重點。
自L3級別往后,系統操作會需要傳感器收集到的數據進行深度學習,模擬實際場景可能發生的情況并不斷進行重復演練,對產業鏈環節中涉及到的各個環節標準也將不斷提高。
傳感器層面的競爭相對更加激烈,多家廠商積極打造符合自動駕駛規格的雷達、攝像頭解決方案等,而算法型公司也根據各自的模型和標的場景加強算力,加速落地。
1、高精度地圖概念與訂單落地
傳統圖商:當司機駕駛汽車行駛在城市或低/高速路段時,導航地圖會向我們推薦一條或幾條路線,現有的多數導航地圖甚至顯示擁堵情況,以及每需要花費的時間。獲得這些信息后,司機根據地圖提供的信息決定是否直行和轉彎,并對周圍的駕駛環境進行評估,可能還要考慮交通管制:信號燈、限速標志等。
高精度地圖:自動駕駛在脫離人力的情況下,無法自主判斷目前所在位置以及依據GPS識別交通信號燈、指示牌、行人以及其他障礙物。因此,包含大量駕駛輔助信息的高精度地圖便成為自動駕駛不可或缺的重要環節。高精度地圖擁有眾多特點,精度多在5~10厘米(高精性)、(包容性)、語義信息多(實時性)。
高精度地圖的制作與應用需要以云服務作為載體,因此相比于傳統地圖License模式,按年(年費)或者按服務量(服務費)的支付方式進行是高精度地圖比較特殊的一點。即使像海外圖商如Here、TomTom等,其高精度地圖產品也還沒有形成比較具體清晰的商業模式。高精度地圖產品最終的收費模式需要圖商、Tier1、車廠等產業鏈中主要參與者共同協商確定。
2、車規級激光雷達
激光雷達通過采取的點云數據,利用3D建模構建數據模型。在自動駕駛行業,通過激光雷達得到的數據與高精度地圖進行結合,再借助深度學習算法返回到實際場景中進行決策。
車規級激光雷達目前擁有1線、4線、8線、16線、32線和64線,線束越高、反應速度和精確度也響應越高,成本也更高昂。目前16線激光雷達在低速場景和園區內應用更廣泛。
車規級激光雷達的參與者主要是Velodyne,Velodyne的產品64線、32線、16線3類產品在售,官方定價分別為8萬美金(約合52.3萬人民幣)、4萬美金(約合26萬人民幣)和8千美金(約合5.2萬人民幣)。
國內參與激光雷達研發的企業包含北科天繪、數字綠土、鐳神智能等。北科天繪目前布局了包含激光雷達芯片在內的自研產品,鐳神智能也發布了多線及固態激光雷達專用芯片。
3、毫米波雷達
毫米波通常是指30~300GHz頻域,能分辨識別很小的目標,且能同時識別多個目標。同超聲波雷達相比,毫米波雷達具有體積小、質量輕和空間分辨率高的特點,擁有較成熟的市場和技術,抗干擾能力也優于其他車載傳感器,由于技術的提升和規模化應用于ADAS,價格也相對更合理。
市場主流使用的車載毫米波雷達按照其頻率的不同,主要可分為兩種:24GHz毫米波雷達和77GHz毫米波雷達。通常24GHz雷達檢測范圍為中短距離,用作實現盲點探測系統,而77GHz長程雷達用作實現自適應巡航系統。
毫米波雷達的市場份額基本都被國外Tier1壟斷,以博士、大陸、Hella和德爾福為代表的廠商壟斷了絕大多數的市場份額。國內上市公司中,德賽西威量產了24GHz毫米波雷達,非上市公司中,行易道科技、木牛科技、蘇州毫米波等企業都獲得了后裝訂單。
毫米波雷達發展趨勢
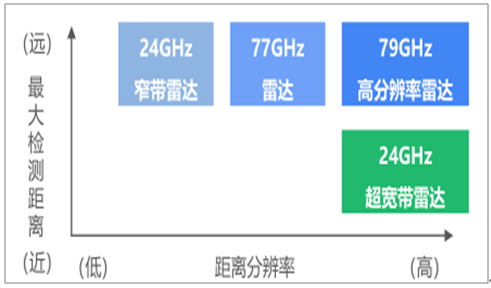
數據來源:公開資料整理
4、芯片
傳統CPU由于算力不足,難以滿足處理視頻、圖片等非結構化數據的需求,而GPU同時處理大量簡單計算任務的特性在自動駕駛領域取代CPU成為了主流方案。
從ADAS在向更高級別自動駕駛進化的過程中,包含激光雷達點云、計算機視覺采集圖像等在內的數據需要進行接收、分析、處理等行為,因此,算法型公司對芯片的需求和類型也存在較大差別。
在目前已有的主流芯片類型中,GPU擅長云端訓練,但功率相對高且推理效率一般;FPGA芯片的算力強但功耗同樣較高,每完成一次燒錄,都會具備新連接方式后的功能;ASIC芯片是專門針對特定客戶特定目的設置的專用芯片,功耗低、體積小等特點很符合車規級產品的標準。
目前出貨量較大的是在輔助駕駛芯片擁有較大話語權的Mobileye,以EyeQ為主的四代產品可以處理8臺攝像頭的數據,目前Mobileye已被英特爾收購;另外英偉達的GPU芯片目前同樣被大規模使用,在前期研發和試行階段,盡管功耗和成本高,但靈活性也相對較強。
相關報告:智研咨詢發布的《2019-2025年中國自動駕駛儀行業市場運營態勢及未來發展趨勢報告》
 智研咨詢 - 精品報告
智研咨詢 - 精品報告

2026-2032年中國商用車自動駕駛解決方案行業市場動態分析及未來前景研判報告
《2026-2032年中國商用車自動駕駛解決方案行業市場動態分析及未來前景研判報告》共九章,包含2021-2025年商用車自動駕駛解決方案行業各區域市場概況,商用車自動駕駛解決方案行業主要優勢企業分析,2026-2032年中國商用車自動駕駛解決方案行業發展前景預測等內容。















 公眾號
公眾號
 小程序
小程序
 微信咨詢
微信咨詢

![2025年中國低速自動駕駛行業產業鏈圖譜、銷售規模、重點企業及未來趨勢研判:低速自動駕駛落地速度加快,行業銷售規模同比增長63%[圖]](http://img.chyxx.com/images/2022/0408/1ba88a0bac4b4a65439b806124f6fc0f4ab03cad.png?x-oss-process=style/w320)
![2024年中國端到端自動駕駛行業競爭格局及發展趨勢分析: 頭部企業加速布局端到端模型,高階自動駕駛商業化進程顯著提速[圖]](http://img.chyxx.com/images/2022/0330/d1363a7ee3953fc25ed09e0b79158acce9dc7c22.png?x-oss-process=style/w320)


